






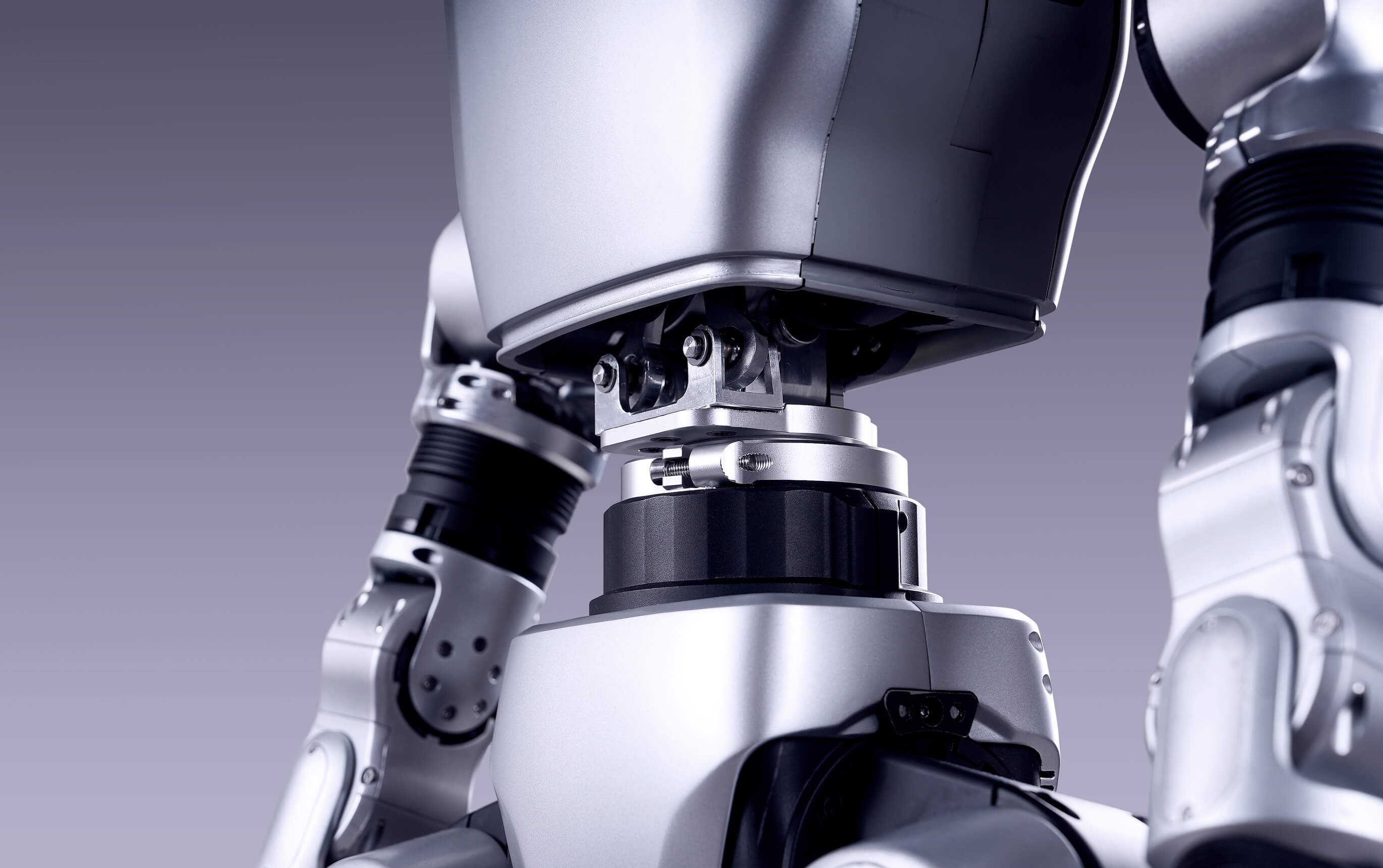
Flexibility beyond ordinary people
Extra large joint movement angle space, 23~43 joint motors
Imitation & reinforcement learning driven
Robotics technology accelerated by AI is upgrading and evolving every day
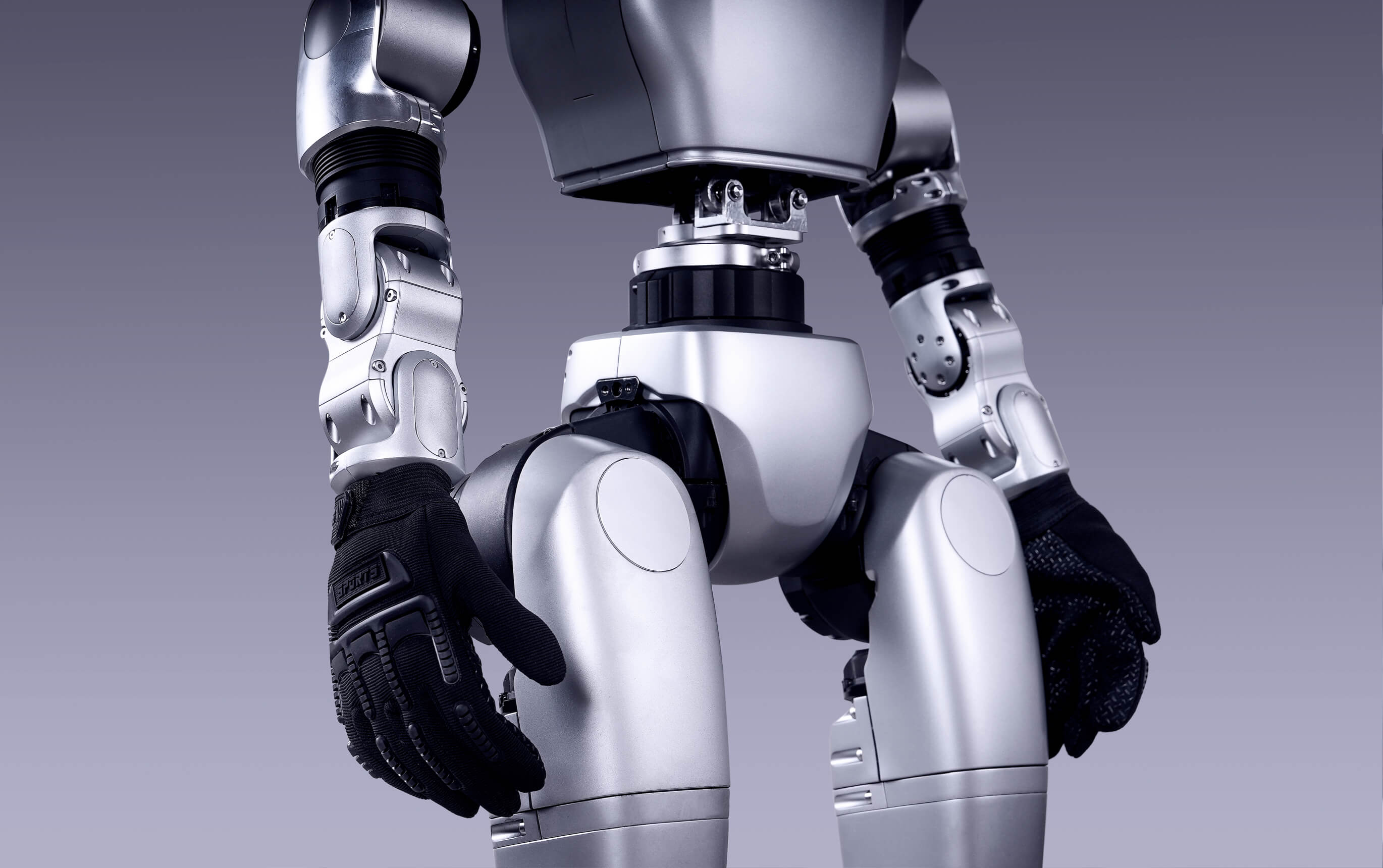
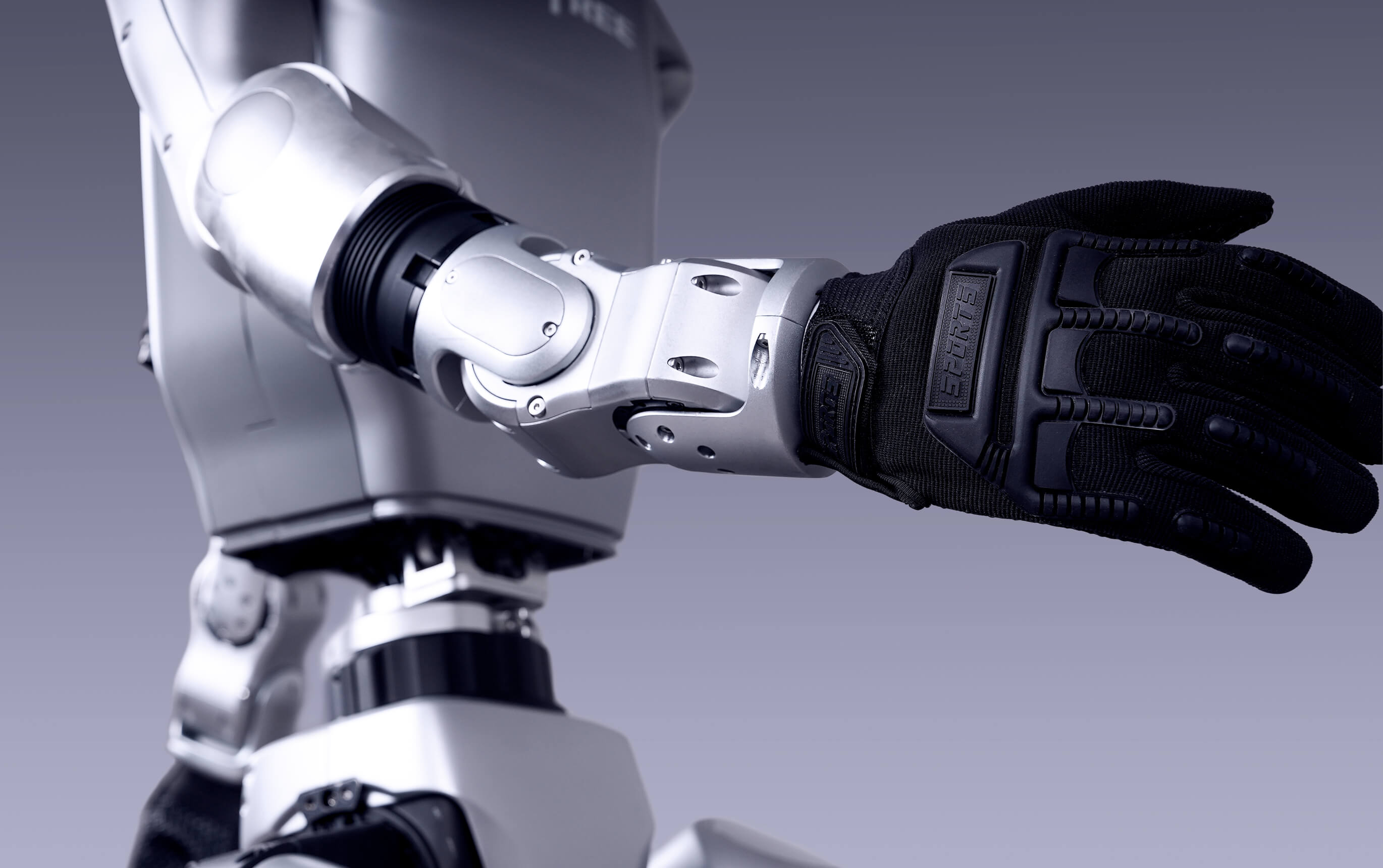
Force control dexterous hand, manipulation of all things
ombined with force-position hybrid control, it is sensitive and reliable, and can simulate human hands to achieve precise operation of objects.
Robot world model, let’s create it together
UnifoLM (Unified Robot Large Model), create a new era of intelligence together
More flexible and more comfortable!
‹
›






Start the agent New era


| Model | G1 | G1 EDU |
|---|---|---|
| Mechanical Dimensions | ||
| Height, Width and Thickness (Stand) | 1320x450x200mm | 1320x450x200mm |
| Height, Width and Thickness (Fold) | 690x450x300mm | 690x450x300mm |
| Weight (With Battery) | About 35kg | About 35kg+ |
| Total Degrees of Freedom (Joint Freedom) | 23 | 23 - 43 |
| Single Leg Degrees of Freedom | 6 | 6 |
| Waist Degrees of Freedom | 1 | 1+(Optional 2 additional waist degrees of freedom) |
| Single Arm Degrees of Freedom | 5 | 5 |
| Single Hand Degrees of Freedom | / |
7 (Optional Force control of three-fingered hand) +2(Optional 2 additional wrist degrees of freedom) *Three-fingered dexterous hand Dex3-1 Parameter: The thumb has 3 active degrees of freedom; the index finger has 2 active degrees of freedom; the middle finger has 2 active degrees of freedom. **Dex3-1 can optionally be installed with tactile sensor arrays |
| Joint output bearing | Industrial grade crossed roller bearings (high precision, high load capacity) |
Industrial grade crossed roller bearings (high precision, high load capacity) |
| Joint motor | Low inertia high-speed internal rotor PMSM (permanent magnet synchronous motor, better response speed and heat dissipation) |
Low inertia high-speed internal rotor PMSM (permanent magnet synchronous motor, better response speed and heat dissipation) |
| Maximum Torque of Knee Joint [1] | 90N.m | 120N.m |
| Arm Maximum Load [2] | About 2Kg | About 3Kg |
| Calf + Thigh Length | 0.6M | 0.6M |
| Arm Span | About 0.45M | About 0.45M |
| Extra Large Joint Movement Space | Waist joint: Z±155° Knee joint: 0~165° Hip joint: P±154°, R-30~+170°, Y±158° |
Waist joint: Z±155°, X±45°, Y±30° Knee joint: 0~165° Hip joint: P±154°, R-30~+170°, Y±158° Wrist joint: P±92.5°, Y±92.5° |
| Electrical Characteristics | ||
| Full Joint Hollow Electrical Routing | YES | YES |
| Joint Encoder | Dual encoder | Dual encoder |
| Cooling System | Local air cooling | Local air cooling |
| Power Supply | 13 string lithium battery | 13 string lithium battery |
| Basic Computing Power | 8-core high-performance CPU | 8-core high-performance CPU |
| Sensing Sensor | Depth Camera+3D LiDAR | Depth Camera+3D LiDAR |
| 4 Microphone Array | YES | YES |
| 5W Speaker | YES | YES |
| WiFi 6、Bluetooth 5.2 | YES | YES |
| Accessories | ||
| High Computing Power Module | / | NVIDIA Jetson Orin |
| Smart Battery (Quick Release) | 9000mAh | 9000mAh |
| Charger | 54V 5A | 54V 5A |
| Manual Controller | YES | YES |
| Other | ||
| Battery Life | About 2h | About 2h |
| Upgraded Intelligent OTA | YES | YES |
| Secondary Development [3] | / | YES |
| Price (Tax and Shipping cost excluded) | Contact Us | Contact Us |